A disproportionate number of the early industrial food-making robots we’ve seen have been focused on pizza. I’ve long posited that this is for two key reasons. First: People like pizza. We eat a lot of it. Americans alone eat three billion pizzas a year. Second: It’s relatively easy to make. The dough provides a fairly straightforward platform onto which ingredients are added.
I say “fairly” here because there are still complications. There’s really no such thing as easy when it comes to building robots that can execute variations on a task at a large scale. Here it’s the dough that presents the problem. Turning a soft and malleable ball of dough into a pizza crust is one of those things humans have figured out how to do efficiently, but it still proves difficult for robot workers.
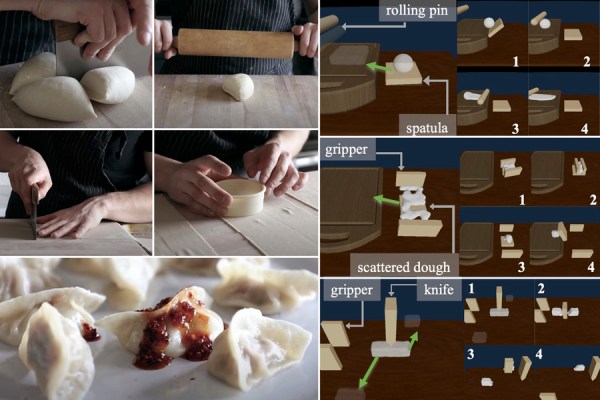
A team of researchers at MIT, CMU and UC San Diego set out to create what they’ve deemed “complex dough-manipulation.” The system is separated into a two-step process, in which the robot must first determine the task and then execute it using a tool like a rolling pin. The system, DiffSkill, involves teaching robots complex tasks in simulations.
MIT notes:
A “teacher” algorithm solves each step the robot must take to complete the task. Then, it trains a “student” machine-learning model that learns abstract ideas about when and how to execute each skill it needs during the task, like using a rolling pin. With this knowledge, the system reasons about how to execute the skills to complete the entire task.
The researchers say the system outperformed those trained in the more traditional reinforcement learning model. “Our framework provides a novel way for robots to acquire new skills. These skills can then be chained to solve more complex tasks which are beyond the capability of previous robot systems,” says CSAIL grad student, Yunzhu Li.
This is robotics, so the whole pizza thing is really an initial problem for a system designed to tackle a lot more tasks. The company points to the emerging field of eldercare robotics as a possible use going forward.