Stanford’s made a lot of progress over the years with its gecko-inspired robotic hand. In May, a version of the “gecko gripper” even found its way onto the International Space Station to test its ability to perform tasks like collecting debris and fixing satellites.
In a paper published today in Science Robotics, researchers at the university are demonstrating a far more terrestrial application for the tech: picking delicate objects. It’s something that’s long been a challenge for rigid robot hands, leading to a wide range of different solutions, including soft robotic grippers.
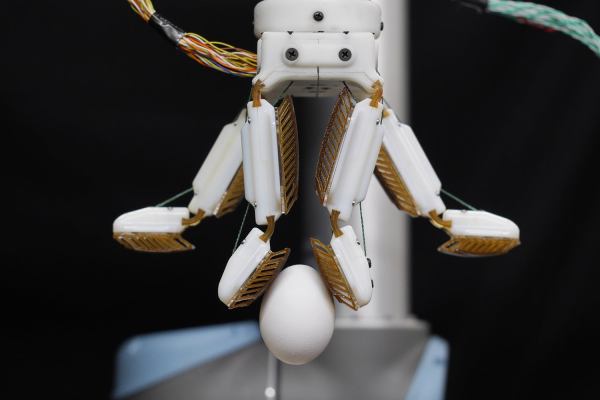
The team is showing off FarmHand, a four-fingered gripper inspired by both the dexterity of the human hand and the unique gripping capabilities of geckos. Of the latter, Stanford notes that the adhesive surface “creates a strong hold via microscopic flaps — Van der Waals force – a weak intermolecular force that results from subtle differences in the positions of electrons on the outsides of molecules.”
The team refers to the issue at hand as the “heirloom tomato problem.” Specifically, standard grippers are best suited to the repetitive task of picking up similarly sized hard objects, one after another. In tests, FarmHand has worked with bunches of grapes, uncooked eggs, basketballs and plates, among others.
“You’ll see robotic hands do a power grasp and a precision grasp and then kind of imply that they can do everything in between,” said Biomimetics and Dextrous Manipulation Lab grad Wilson Ruotolo. “What we wanted to address is how to create manipulators that are both dexterous and strong at the same time.”