Lunar rovers are cool — but imagine how much cooler they’d be if they could also rappel. Researchers at Carnegie Mellon University will try to make rappelling robots a reality, after having been selected by NASA as the recipient of a new $2 million research grant aimed at coming up with new technology to help robots explore “pits” on the Moon.
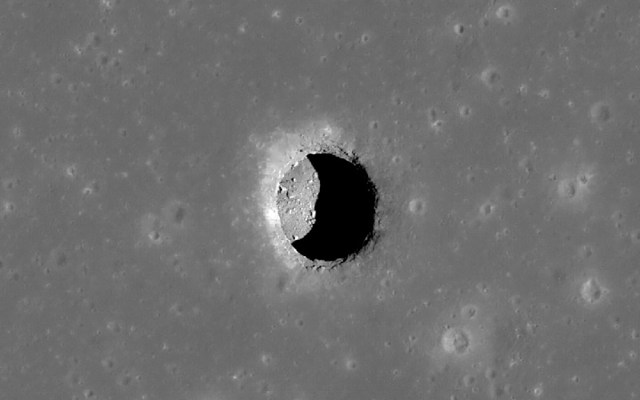
Yes, pits, as distinct from craters, which are essentially surface features caused by meteorite impacts. These pits are more akin to sinkholes or caves on Earth, with surface access but also with large underground hollow caverns and spaces that might provide easier access to minerals and water ice — and which might even serve as ready-made shelter for future lunar explorers.
CMU Robotics Institute Professor Red Whittaker put forward a potential mission design that would aim to use intelligent, agile and fast robots to study these pits close up, since they’ve been spotted by lunar orbital observers but these images don’t really provide the kind of detail needed to actually discover if the sinkholes will be useful to future Moon missions, or how.
Whittaker’s draft plan, which is codenamed “Skylight,” would use robots that have a degree of autonomy to self-select where to look in their surface investigations, and they’d also need to act quickly: Once lunar night sets in, they’d be offline permanently, so they’d get about one week of active use time per the mission parameters.
NASA’s ambitious mission to send astronauts back to the lunar surface by 2024, and to establish a base on the Moon by 2028, will benefit from the kind of scouting provided by missions like “Skylight,” but timing will be tight — current projections estimate 2023 as the target for when such a mission might happen.