MIT researchers are working on a new steering system for drones that uses uncertainty to ensure that they don’t hit obstacles as they fly autonomously. The system is a bit complex but it’s called NanoMap and it quite simply finds ways to get from point A to point B without crashing and while handling random objects in its path.
Spectrum describes the system in detail but basically the drone takes a depth measurement as it moves along a path. Each time it takes a measurement and is about to move forward it looks back at previous measurements which could include some information pertinent to the current motion. If it can’t find anything useful it slows down and assesses the area and if it does find previous information it keeps flying, avoiding obstacles as it goes.
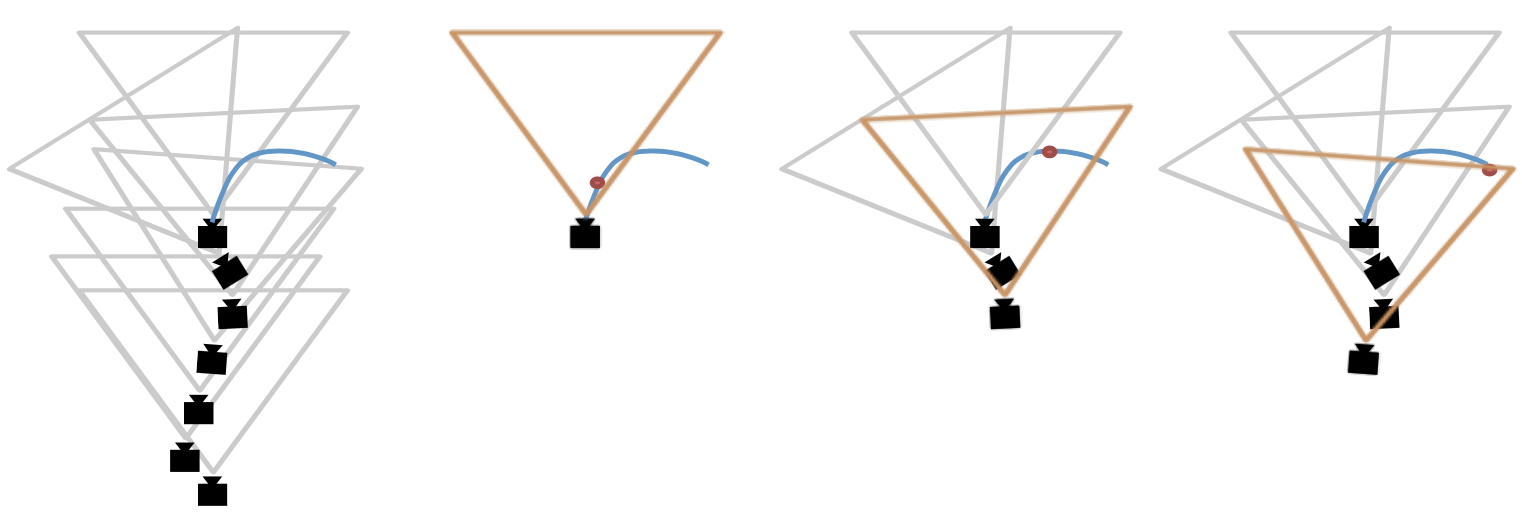
This is important because current models require a drone to map its surroundings before becoming “confident” that it can handle flying around more quickly. This technique creates an on the fly map that lets the drone handle uncertainty as opposed to being ready in every situation. Further, this allows drones to zip between pillars or trees and base their next move on information gathered on the fly and not over time. From the study:
In testing, the researchers found that their uncertainty modeling really started to pay off when drift got much worse than 20 cm/s or so. Up to about 75 cm/s of drift, planning with NanoMap and incorporating uncertainty was able to keep the drone from crashing 97-98 percent of the time. With drift well over 1 m/s, the drone was only safe 10 percent of the time, but that was three times more robust than testing without uncertainty modeling. The press release sums it up overall:
If NanoMap wasn’t modeling uncertainty and the drone drifted just 5 percent away from where it was expected to be, the drone would crash more than once every four flights. Meanwhile, when it accounted for uncertainty, the crash rate reduced to 2 percent.
The team is at MIT’s CSAIL lab and is led by Pete Florence in Russ Tedrake’s lab. You can read the paper here and read more here.