The field of soft robotics has been the subject of increasing interest in recent years for the alternatives it presents to the rigid machines we tend to associate with the space. A team of scientists at North Carolina State University is offering an interesting take on the space, utilizing magnetic fields to move around the biologically inspired robots.
In a paper published earlier this week, the team highlights how magnetic fields can be used to control predetermined movements in the small soft robots, potentially paving the way for their use in a variety of different fields, including different biomedical applications, like embedded pumps that can be triggered remotely to deliver medication to a system.
The team’s work means that movement can be induced remotely in the robots. It also can be accomplished without having to tether the robot or plug it into a power source or air pump, as is the case with more traditional soft robots, which require their bladders to be inflated and deflated in order to perform tasks like opening and closing a soft robotic hand.
“The magnet chains are embedded in the polymer, and when we apply a magnetic field, a torque is generated that tries to align the chains with the field directions,” associate professor Joe Tracy tells TechCrunch. “So, if the polymer can bend, it’s free to bend in a direction that allows the chains to align with the field, then it will bend.”
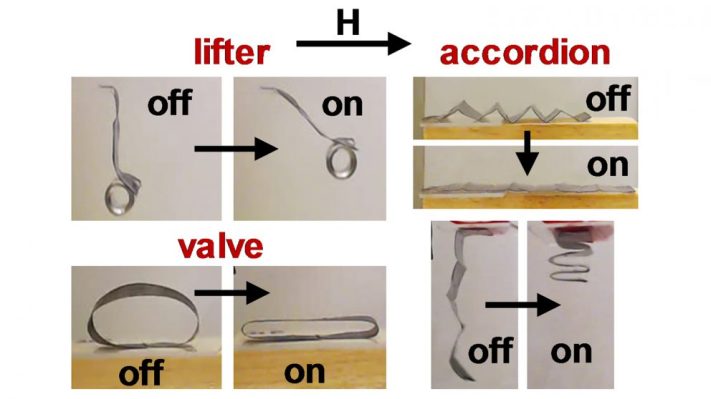
Using magnetic particles embedded in the device, the team is able to get the robot to complete relatively complex tasks, in spite of their simple designs. Video of the team’s work in action looks downright alien. When a magnetic field is applied to the structures, an accordion-shaped soft robot flattens and a straight one coils. The moving structures bring to mind bacteria, moving at the behest of some invisible force.
For those familiar with the field of soft robotics, they no doubt also conjure up memories of the work of Harvard’s team, like George Whiteside’s otherworldly multi-gait robot, which is capable of shimmying under a door. Like that octopus-inspired robot, the team at NCSU has drawn its inspiration from nature.
“A lot of the idea behind soft robots is biomimetic,” says Tracy. “We see how plants and animals work, and a lot of that is soft materials. The overall field is trying to move in the way of mimicking nature and natural structures.”

Soft robots have a number of built-in advantages over their more traditional counterparts. They’re cheaper, they’re more pliable and they’re safer for human interaction than their harder predecessors.
And the team’s robots take the notion of simplicity even further, stripping the robots to their bare minimum, while still making them capable of lifting up to 50 times their own weight, expanding and contracting and working as a makeshift pump.
At present, each is only capable of a single task, but part of the beauty of soft robotics is a pliability that allows them to be manipulated to perform different tasks. For now, however, the team is able to alter the strength and the direction of the reaction, based on the magnetic field.