If you’ve never picked a raspberry, well, first of all that’s too bad, because a fresh raspberry is a beautiful thing. But second, and more immediately relevant in this case, you would not know that there is a technique to it that, surprisingly, robots aren’t super good at because they tend to be… crushy. But this robo-berry designed by Swiss researchers could usher in a new era of gentle, automated robo-pickers.
The secret to picking a raspberry is to grip it just enough to get purchase and then pull it downwards off the little stem, apparently called the “receptacle,” which seems backwards. Seems simple — and it is, but only our hands are among the most sensitive and finely controlled constructions in the universe, the culmination of a hundred million years of evolution, outdone only by (I suspect) raccoons.
Robots simply don’t have the senses necessary to figure out the perfect technique for picking a berry. But what if it could communicate with the berry to better sense the forces involved and avoid either a a brutal crushing or humiliating failure-to-detach?
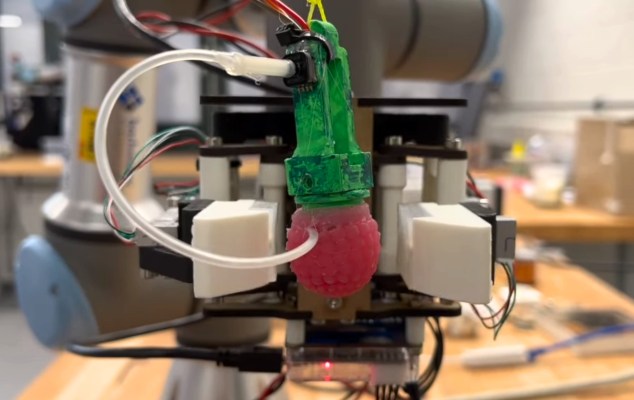
That’s what Kai Junge, a PhD student at EPFL in Switzerland, aims to accomplish with this “sensorized raspberry,” a silicone and silicon replica berry that provides feedback to the picking machine, allowing it to learn to pick faster and better — and cleaner.
“It’s an exciting dilemma for us as robotics engineers,” said professor Josie Hughes, who worked with Junge on the project. “The raspberry harvesting season is so short, and the fruit is so valuable, that wasting them simply isn’t an option. What’s more, the cost and logistical challenges of testing different options out in the field are prohibitive. That’s why we decided to run our tests in the lab and develop a replica raspberry for training harvesting robots.”
Apparently the hard part comes just at the moment of detaching, when the force needed to grip the berry on the receptacle suddenly becomes overkill as the object goes from solid to hollow.
The replica berry has a fluidic sensor that tells the system how much compression is being experienced by the silicone drooplets, allowing the control model to learn how to adjust its grip as if the berry itself is telling it how much is too much.
You can see the berry in action below:
The team plans to present their work at RobotSoft in April. And once the raspberry question is decided, they may move on to other berries, tomatoes, grapes… even apricots. The future is looking fresh!