The snake has long been one of the most compelling demos out of Carnegie Mellon’s robotics lab. Inspired by the biblical reptile of the same name, its long, skinny build makes it perfect for squeezing into tight spaces, guided by the camera embedded in its head. It can wind around rubble and coil around and climb poles for a better view — all in all, a pretty impressive piece of engineering. The robot has been deployed in a wide range of locations, from the Pyramids of Giza, to an abandoned power plant in Austria, to the sewers back home in Pittsburgh.
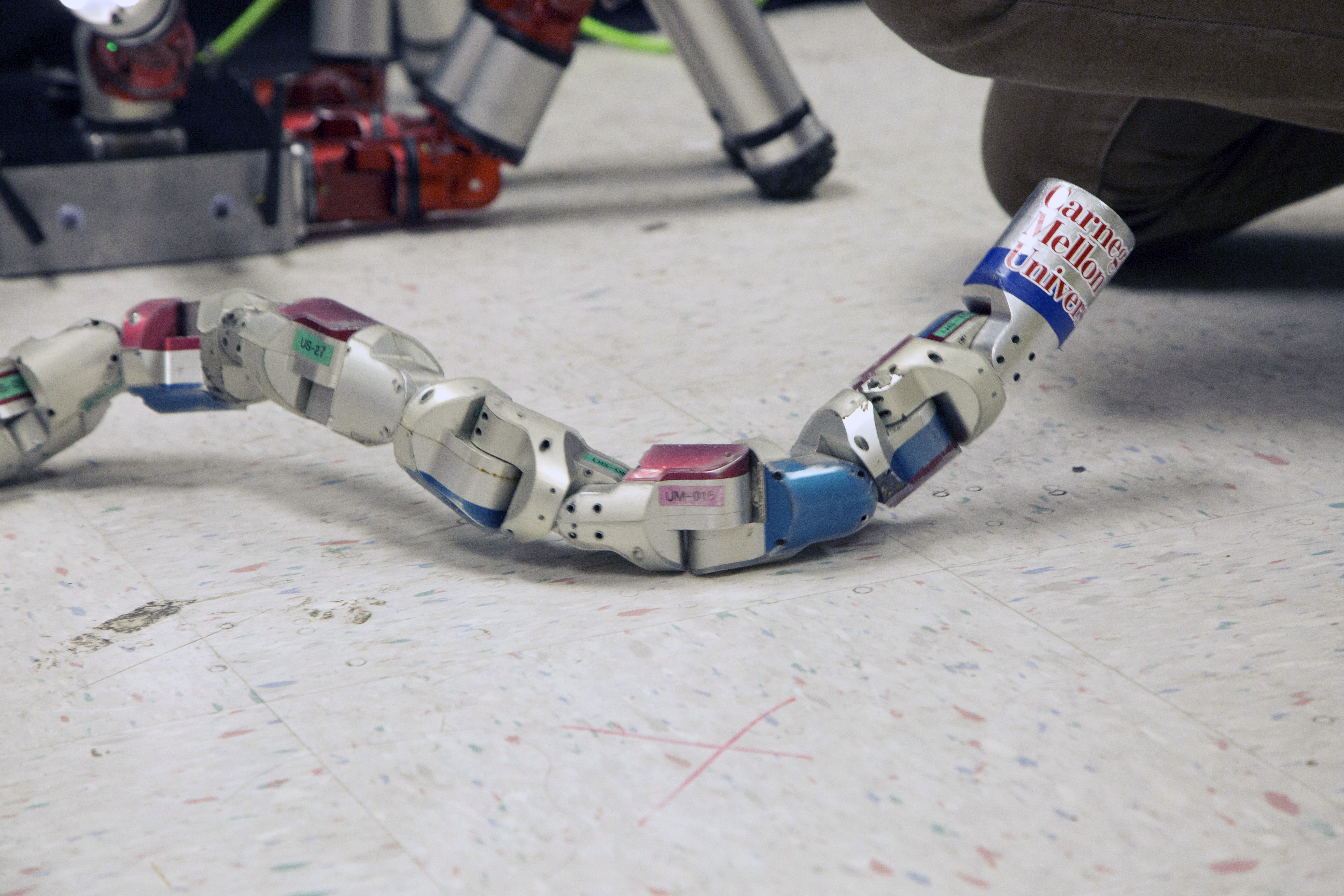
CMU’s Biorobotics Lab started work on the project around a decade ago, producing its first viable robotic snake two years later. Since then, a small handful of companies have been working on commercial applications for the reptilian robot, focused mainly on search and rescue missions deployed in places people can’t reach. But for the school, the project has been a jumping off point for future robotic exploration.
More recent versions have brought force sensing to the snake, so it can determine how tightly it needs to wrap around an object in order to cling on, eliminating the need for roboticists to preprogram it based on conditions. In order to do so, the team turned to a more modular design for the robot, with interchangeable segments that can be added and subtracted to change the length of the robot.

It’s part of a larger trend toward modularity that has grown in popularity in the robotics community over the past decade, creating systems that are much more adaptable to a wide variety of needs. It’s sort of like robotic LEGOs, and, in fact, the team that helped the snake go modular recently spun off to form HEBI, a startup that develops plug and play robotic actuators adapted from their snake design.
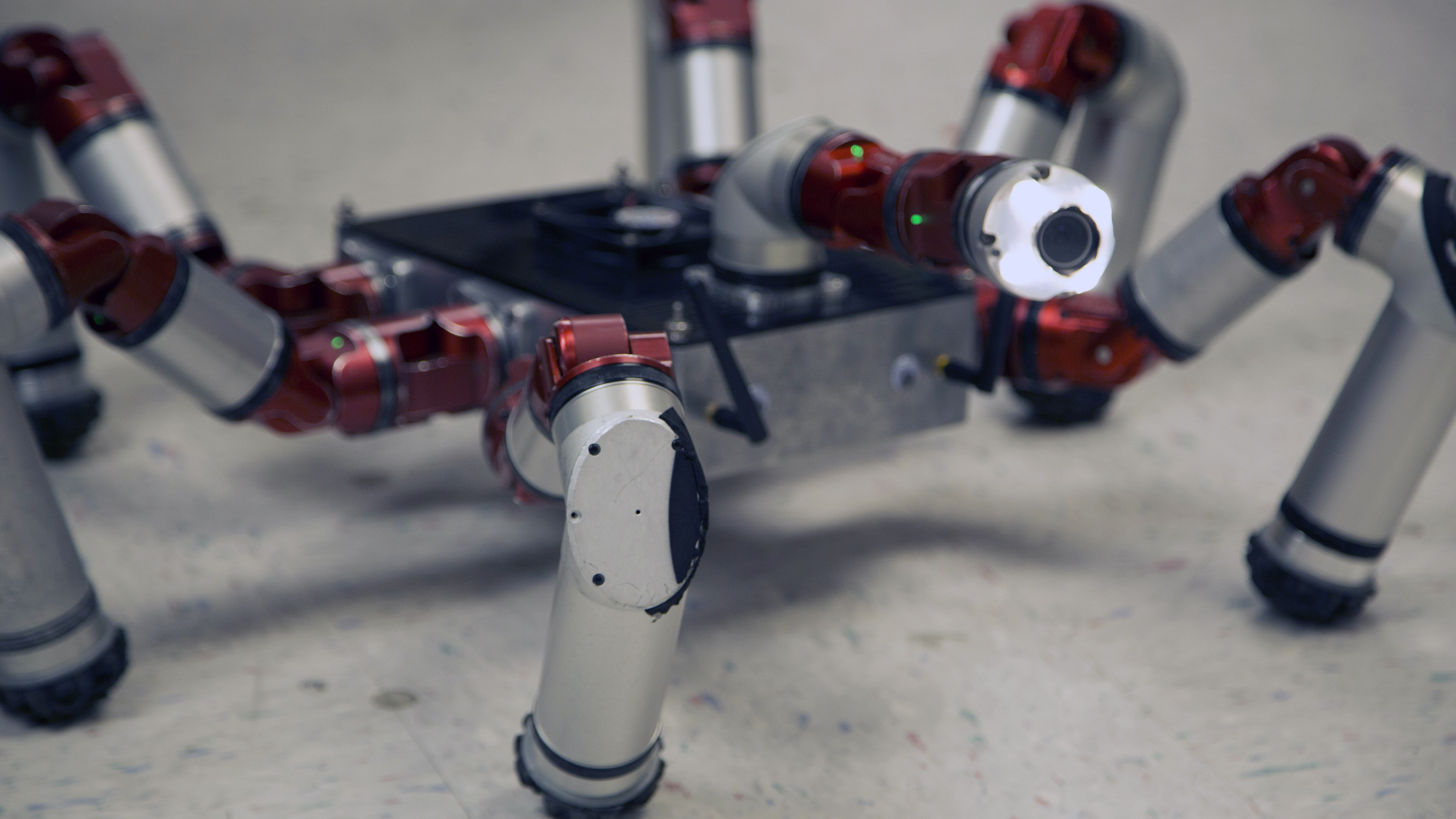
When we visited the Pittsburgh lab that created the snake robot, however, we were greeted by a different beast entirely: a six-legged creature that looked like a metal insect or crustacean — albeit one roughly the size of a small dog, with a serpentine head that periscopes above its square body. Upon closer inspection, it’s clear that the bug shares robotic DNA with the snakes that preceded it. The team refers to it as the “Snake Monster.”
Its legs and head are made up of the same joints as the snake, albeit reconfigured like a robotic Frankenstein’s Monster. The extra space on the body means room for a battery and other internal components, so the robot can walk around untethered, unlike its narrower ancestor. The built-in pressure sensing also means that, like the snake, the six-legged robot is able to traverse rocky terrain.
“The robots are able to walk over rough surfaces without detecting exactly where the ground is — just by sort of feeling their way,” explains doctoral student Julian Whitman. The team also has made the robot’s motions adaptable, so it can adjust based on the number of legs it’s allotted. “We developed a way to rapidly design gaits,” adds Whitman, “so when you change the arms and legs, you’re able to quickly deploy it again in minutes. It has [a variety of] different walking styles based on number of legs.”
Like the snake before it, the multi-legged robot was inspired by the ways animals interact with their environment. In the case of the Snake Monster, the legs adapt to the surface they’re walking on. This means that, as with the snake’s ability to climb poles, no preprogramming is involved and a vision system isn’t required to map the terrain. Instead, the elastic actuators that make up the robot’s legs conform to the surface it’s walking on, and the robot shifts its weight accordingly.