
The threat of minefields is an ongoing and horrifying one, and the duty of clearing them is as difficult as it is dangerous. All the more reason, then, that it should be done by robots! A new type of inexpensive, versatile bot modeled after turtles could be a great tool for this and other jobs.
Ben Amor and Dan Dukes of Arizona State University were interested in the problem of how to deploy robots quickly to environments where their means of locomotion isn’t necessarily the best. For instance, if your bot has pointy feet and walks like a quadruped, it may not be very effective in sand or rubble. The robot should be able to adapt.
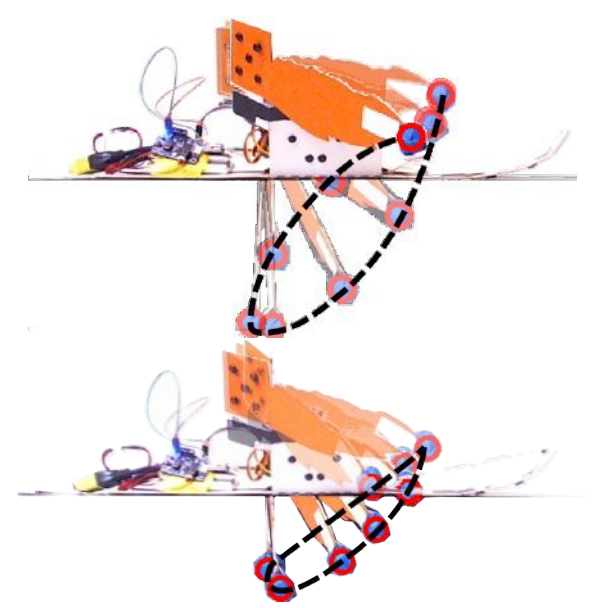
The motion of the fin before learning (top) and after a few learning sessions.
The solution the researchers propose is a robot (the “C-Turtle”) with a simple crawling gait inspired by sea turtles’ movement in sand. A special learning algorithm tweaks the movement on the fly, and the robot itself is basically made from a single sheet of material and can be constructed or modified in a matter of hours.
“In contrast to the majority of reinforcement learning algorithms that potentially require many trials, our method needs only a small number of trial-and-error interactions with the environment to learn how to locomote,” Amor wrote in an email to TechCrunch. “Indeed, in most of our experiments the robot learned a new gait within 1-2 hours.”
It may be, for example, that the robot needs slightly longer or shorter “fins,” or that the motors controlling them need to be juiced up or rotated slightly. This information, Amor and Dukes write, can only reliably come from testing in the environment itself; lab tests with multiple materials can’t prepare the robot’s little brain for every possible combination of dust, dirt, sand and cruft.
Amor told New Scientist that swarms of the bots could be deployed to former combat zones where landmines are often found. A hundred or so would get used to the terrain, then spread out and, upon finding a mine, either notify a handler or… well, it might be obvious that it found one.
At around $80 per unit, they’re cheap enough to make en masse and simple enough that no special training should be required to assemble them. C-Turtle’s creators do plan to release the design at some point.
C-Turtle’s creators will be presenting their work at MIT’s RSS 2017 conference, then at Stanford’s Living Machines. Afterwards they plan to release the design and instructions so other roboticists or interested parties can make their own. You can check out more of the team’s work at ASU’s Idealab.