Imagine the difficulty of trying to inspect a working gas turbine. There is not only intense heat, blades are constantly spinning, making getting a camera inside to examine the operating turbine a huge challenge. A team at the GE Global Research Center in Niskayuna, New York has been working on several small experimental robots designed to solve some of these issues.
Traditionally, engineers have dropped a camera called a borescope into a predesigned hole in the turbine shell to get a view of the turbine blades as they turn inside, but this method has many limitations. “Using the traditional method makes it challenging to navigate through to all points of the turbine while keeping the camera oriented in the correct direction to inspect each component,” Kori Macdonald, a robotics engineer at the GE Global Research Center explained to TechCrunch.
What’s more, when the engineers locate an issue with the borescope such as a blemish in the protective coating on a blade, there is no way make a repair without opening the turbine. This means shutting it down, opening it up, locating the blade in question and undertaking the repair, a process that could take up to 12 hours, during which the turbine isn’t operating.
Finding a better way
A team of scientists and engineers went to work on the problem and came up with a few creative solutions as part of ‘The Turbine Surgeon’ project. They began by developing a small flexible robot prototype, designed to move between the blades as they turn, giving engineers a much more comprehensive view of what was going on inside the turbine than the borescope.
The prototype they showed us was about the size of a PC card and was equipped with extremely bright LED lights and a small high-resolution pivoting camera. Operators can move the robot between the blades while operating the camera using software they developed as part of the project. This approach enables them to get a variety of views and get a better idea of issues on a particular blade.
Part of the reason this design was even possible is the miniaturization of components along with the computing power now available on small chips. When you combine that with more efficient LED lights and high-resolution cameras, the team could create a robot that could operate for a full inspection without running out of battery power.
Rethinking the problem
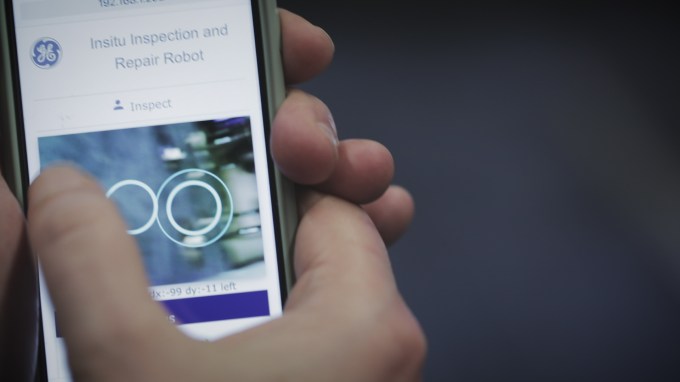
You can control the Crawler robot with a virtual joy stick app on your phone. Photo: Veanne Cao/TechCrunch
That allowed them to get a better look at what was going on, but they were still faced with shutting down the turbine to conduct even a minor repair. To solve this issue, they created a similar robot, except this one had a miniature repair kit attached to it. A person controlling the robot via software can open the repair module, shoot some material from a tube onto the broken coating and smooth it out using a small paddle included with the kit. This approach would allow them to more proactively maintain the coating on the blades.
“We are also able to develop tools which can perform turbine maintenance [without opening the turbine case]. In addition to saving time, by executing repairs as soon as they’re discovered, we can reduce the amount of any further damage to our components. This is akin to doing a heavy fluoride treatment when a small breach in tooth enamel is discovered instead of treating a full-blown cavity later,” Macdonald explained.
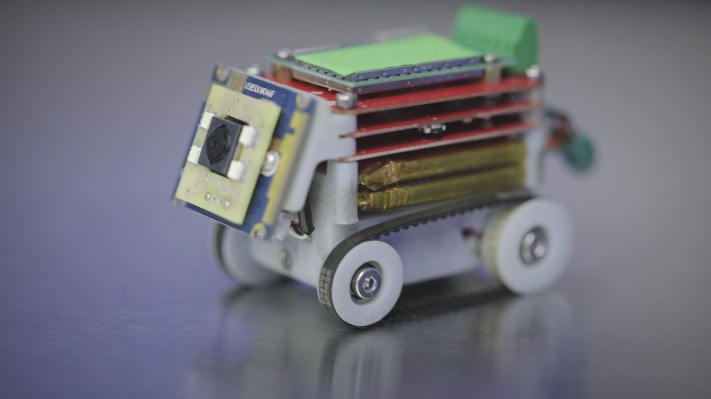
They also showed us a small robot called ‘The Crawler’ that looks like a Matchbox truck with a set of magnetic wheels that attach themselves to the turbine blade. Like the other Turbine Surgeon robots, it’s equipped with LED lighting and a camera mounted on it, but unlike the other robots which are designed to move between the rotating blades, this one has been designed to drive on the blades themselves.
An operator can control the robot by smartphone app or via a laptop application that acts like a virtual joystick allowing you to drive it up and down the blade. As with the repair kit robot, this one could have modules attached to it for repairs or other tasks.
While these robots are still very much in the prototype stage — they wouldn’t even let us take pictures of the flexible inspection and repair robots — the project shows a willingness to look at the turbine inspection problem with different eyes. The borescope was simply the way it was done and nobody had considered rethinking the approach until this team came along and began studying the inspection problem with a fresh perspective.