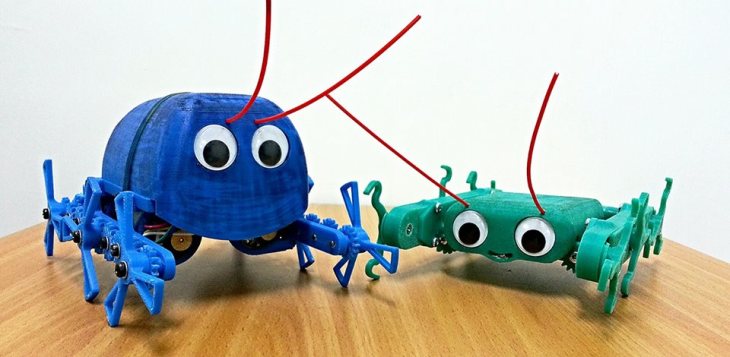
Meet Charlie and Billy, the most adorable little robots in all the land.
Billy, the first iteration, is a combination of 3D-printed parts, an Arduino Leonardo, and dual DC motors to form a hexapod robot. Billy is controlled through a simple joystick app on the phone, and can handle various types of terrain based on his build.
Charlie is the second prototype, and is much smaller and smarter. Charlie is able to walk upside down in case he ever tips over, and is able to traverse slopes as steep as 45 degrees. He can even climb over objects as tall as he is.
Both Billy and Charlie were created by Jonathan Spitz, a mechanical engineer getting his PhD at the Technion Institute of Technology in Israel.
Billy is comprised of 20 parts, while Charlie requires 38 different parts, and takes considerably longer to assemble.
“I used a smaller Arduino micro and two Baby Orangutan microprocessors to control Charlie’s four motors: two for walking and two for sprawling,” Spitz told 3Ders. “The idea is to free the Arduino to take care of processing sensor data (an IMU will be added to the final version) and let the Baby Orangutans deal with closed loop motor control. Charlie is also controlled over Bluetooth.”
All in all, Spitz says that both robots require about 24 hours of 3D printing.
Now that Spitz has refined his idea into the adorable and mighty Charlie, he’s looking into putting the project on a crowdfunding site and take the duo to market.