Remember Project Tango? Google’s crazy project to add 3D environment mapping abilities to a smartphone?
Yeah, someone just went ahead and took the next logical step: they plugged it into a drone.
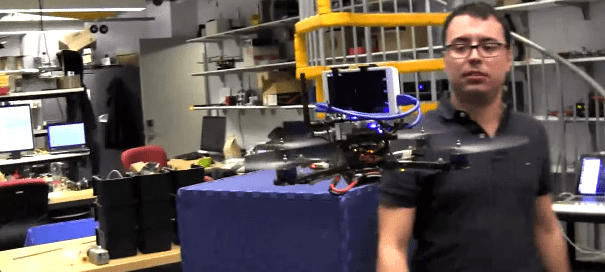
Researchers at the University of Pennsylvania managed to get their hands on a prototype Tango device, and quickly strapped it into their self-built quadcopter.
This is probably a good place for a Skynet joke, but all I can see are Manhacks. Don’t forget your crowbar!
The video above can do with a bit of explanation, so here’s what you’re seeing:
- For the first minute or so, the drone is using data from the Project Tango unit (and only that data — no external sensors) to try to maintain its position in space. Notice that however the drone is jostled — up, down, left, or right — it returns to its original location.
- For the next few minutes, they’re commanding the drone to fly to different locations in the room and stay there. Even if they bop the drone off of its path along the way, it’ll find its way there. Once there, it’ll do its damnedest to stay in that 3D coordinate.
The important part here: that laptop you see in the background isn’t telling the drone how to get from Point A to Point B. It’s just giving the researchers an interface to point at a location where they’d like the Drone to fly; from there, the Tango-fied drone is working everything out on its own, based on its self-mapped knowledge of the room and where it needs to get.
In case you’re curious as to what the data Project Tango captures can look like, here’s a video of what it could do months ago. To put it far too simply: it’s pretty amazing.
[via IEEE]