In some of the old science fiction stories I remember from Weird Tales and Ray Bradbury and the like, robots always figured. But they always came the way you might expect a new dryer or hot water heater to arrive. In a big box, packed in straw or foam, heavy and metal of course as they always were back in the day. But the world of robots is different from the way they imagined it then: the metallic golems of yore have given way to a sort of Cambrian explosion of potential robot types, imitating everything from worm to dog to bird.
A team of researchers hopes to both expand that robodiversity and change the way our future companions are delivered. Funded by the NSF, they’ve begun a 5-year-long project exploring the idea of on-demand robots.
MIT is leading the effort, specifically Professor Daniela Rus from CSAIL. They have researchers from University of Pennsylvania and Harvard on the team, and the object is to “make it possible for the average person to design, customize and print a specialized robot in a matter of hours.”

Imagine, just for a domestic example, that you have a crawl space that’s difficult to get into and possibly dangerous. You could hop online or go to your local robot shop and have them create an ambulatory, four-legged robot with a couple pincers in it, so you could easily get any tools or toys that happen to go under there, or check for mice, or inspect wiring and construction for damage.
A standard robot might do, but you might need it bigger or smaller, or with or without a camera, or with a magnet or insecticide dispenser instead of a gripper. Or maybe the robot you need is outdated or expensive, or requires assembly, or must be shipped from Korea. Why should replicating a copy of a product with the end user apply only to media? Have it made right in your neighborhood, ready for pickup in the afternoon after the resin body has solidified and the stock boards have been updated with the latest control firmware.
The project leaders sum up its scope thusly:
The capability to customize cyber-physical systems on-demand would change how we plan for contingencies. Rescuers engaged in humanitarian aid and disaster reliefs in remote locations could minimize their logistic needs on-site. Warehouses of spare and replacement parts that may never be used could be replaced by storing only their designs digitally, not the physical parts themselves.
Fundamental problems in computer science about what is computable by digital machines will change. The problems will be reframed in a larger context as what functional hybrid machines are constructable from cyber-physical primitives.
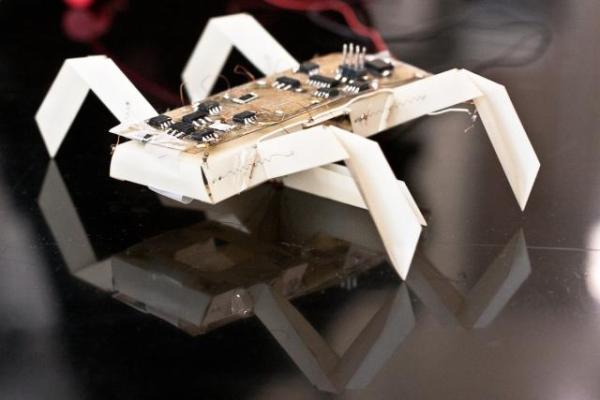
As for the research itself, it will encompass more or less the entire ecosystem: supportive tools and materials for design and engineering of the “mechanical, electrical, computing, and software aspects of the device,” algorithms for production and assembly, programming and operational environments, and more. A few prototypes show how functional robots can be created from a few parts and an “origami” type structure.
They intend to include K-12 students in the process as well and establish sub-programs at the universities participating in the project. The $10M in NSF funding could end up going rather quickly when all these things are considered.
Needless to say, the potential revolutionizing of product engineering and delivery could have enormous implications down the line, although at the moment it is mostly speculative. Notably, this is fully orientated towards consumer applications, not military, where one might reasonably expect on-demand robotics to be sought after. The results of this program’s research are sure to be interesting and influential, as anything with a pedigree like this with fabrication and decentralized design and engineering as a starting point is certain to bear fruit.